
激光雷达是一种采用非接触激光测距技术的扫描式传感器,其工作原理与一般的雷达系统类似,通过发射激光光束来探测目标,并通过搜集反射回来的光束来形成点云和获取数据,这些数据经光电处理后可生成为精确的三维立体图像。采用这项技术,可以准确的获取高精度的物理空间环境信息,测距精度可达厘米级,因此,该项技术成为汽车自动驾驶、无人驾驶、定位导航、空间测绘、安保安防等领域最为核心的传感器设备。

一、激光雷达的分类
从技术原理来看,激光雷达的类型主要有两种:
1、旋转式激光雷达:通过多束激光竖列而排,绕轴进行360°旋转,每一束激光扫描一个平面,纵向叠加后呈现出三维立体图形。多线束激光雷达可分为16线、32线、64线,线束越高,可扫描的平面越多,获取目标的信息也就越详细,线束低的激光雷达由于点云密度较低,容易带来分辨率不高的问题;
2、固态激光雷达:摒弃了原有的机械扫描方式,采用相控阵原理,有许多个固定的细小光束组层,通过每个阵元点产生光束的相位与幅度,以此强化光束在指定方向上的强度,并压抑其他方向的强度,从而实现让光束的方向发生改变。
由于固态式激光雷达,不具备旋转组件,这在一定程度降低了硬件成本和磨损消耗,且在个别光束阵元损坏的前提下,固态式激光雷达整体仍可持续工作,在可靠性上实现了大大提升。
二、激光雷达的主要应用领域
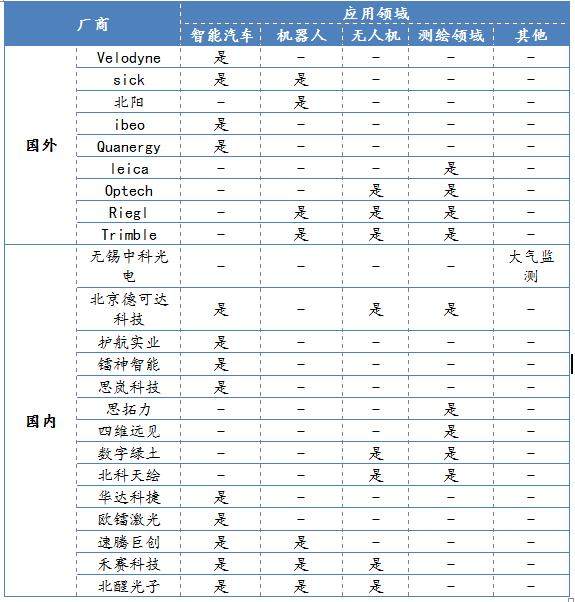
激光雷达的下游应用领域核心是扫地机器人、AVG小车、汽车自动驾驶、无人驾驶、空间测绘和无人机等领域。从目前全球激光雷达企业的下游应用领域分布来看,居多的仍然是智能汽车和机器人领域。
|


